†
La prťcision du systŤme dťpend :
- de la technique utilisťe.
- du type de rťcepteur.
- de la position et du nombre de satellites.
- du temps d'observation.
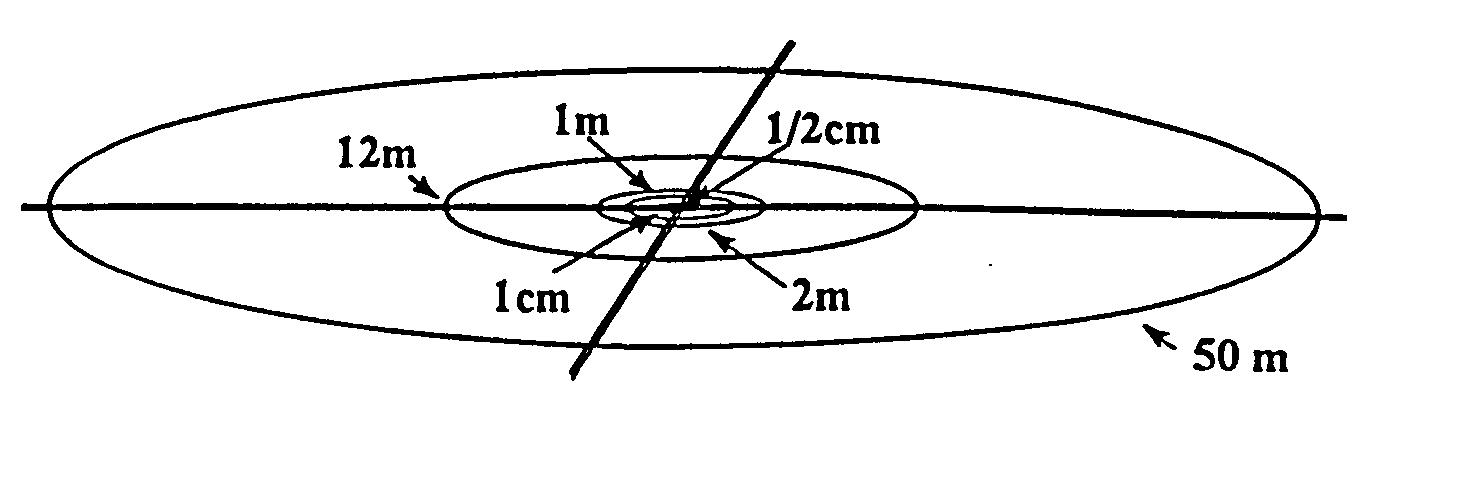
Visualisation des diffťrentes ťcarts et distance d'erreurs en fonction du GPS et du mode opťratoire :
Positionnement Standard en mode isolť
Standard Positioning Service SPS - Code C/A
Positionnement Prťcis en mode isolť
Precise Positioning Service PPS - Code P(Y)
Rťcepteur SIG - DGPS
Rťcepteur SIG de qualitť - SPS-DGPS
Lever Cinťmatique temps rťel
GPS en mode statique de prťcision
Dťfinitions des critŤres
de prťcision
- La prťcision des rťcepteurs GPS ne recevant pas de corrections diffťrentielles est de 100 m ŗ 95 % du temps (avec le S/A).
- Il s'agit d'une prťcision sur la composante planimťtrique. La composante verticale peut Ítre de une ŗ trois plus faible.
Erreur probable (CEP = Circular Error Probability)
Elle reprťsente 50 % de probabilitť, c'est-ŗ-dire que pour 100 positions enregistrťes, 50 positions seront < 40 m et 50 seront au-delŗ.
Ecart-type Sigma = RMS (Root Man Square)
Elle reprťsente 68 % de probabilitť, c'est-ŗ-dire que pour 100 positions enregistrťes, 68 positions seront< 50 m et 32 seront au-delŗ.
Ecart-type Sigma x 2 = 2drms
Elle reprťsente 95 % de probabilitť c'est-ŗ-dire que pour 100 positions enregistrťes, 95 positions seront< 100 m et 5 seront au-delŗ.
Ces prťcisions sont annoncťes pour des distances entre le rťcepteur mobile et la station de rťfťrence infťrieures ŗ 500 km.